دانشمندان چینی حسگر نوری به اندازه دانه برنج ساختند که حس لامسه آنی و قابلیت تشخیص تومورهای پنهان را به رباتهای جراح اضافه میکند.
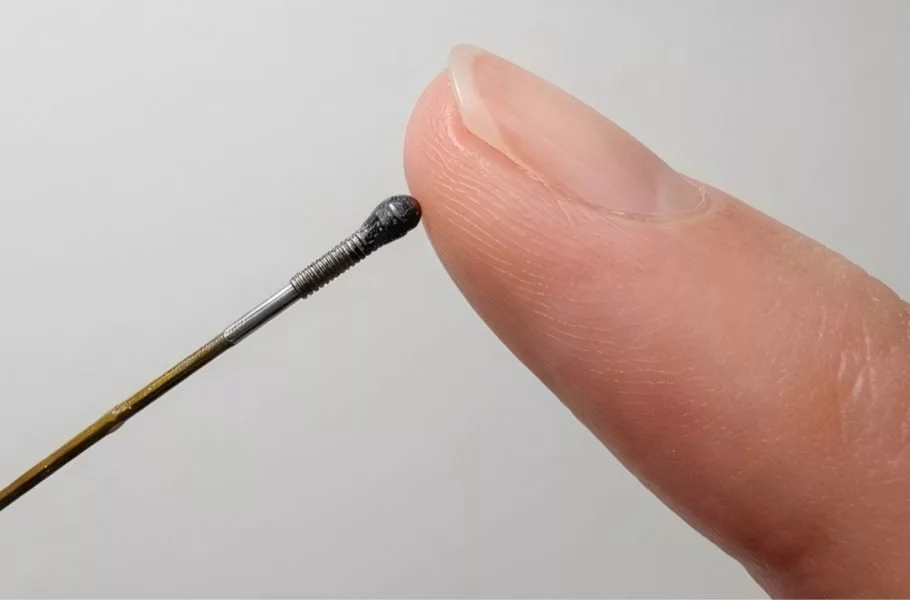
به گزارش پایگاه خبری بهرهورنیوز به نقل از دیجیاتو، پژوهشگران دانشگاه شانگهای جیائو تونگ حسگر نوری بسیار کوچکی ساختند که با ابعادی در حدود یک دانه برنج (۱.۷ میلیمتر) تحولی در جراحیهای رباتیک ایجاد میکند. این فناوری به رباتهای جراح امکان میدهد تا حس لامسه را بهصورت آنی تجربه کنند.
برخلاف سیستمهای فعلی که فقط بر دادههای تصویری متکی هستند، این سنسور میتواند پارامترهای فیزیکی پیچیده شامل نیرو، فشار، برش، پیچش یا گشتاور را در تمام جهات با دقت بالا اندازهگیری کند.
اهمیت این دستاورد در آن است که در جراحیهای حساس مینیاتوری مانند جراحی چشم یا عبور از مسیرهای بسیار باریک بدن، جراحان با محدودیت دید و فقدان بازخورد فیزیکی روبهرو هستند و این حسگر با رصد دائم تماسهای فیزیکی، از بروز هرگونه برخورد ناایمن یا آسیب ناخواسته به بافتهای ظریف جلوگیری میکند.
حس لامسه در رباتهای جراح
ساختار فنی این حسگر برپایه جایگزینی سیستمهای الکترونیکی پیچیده با مکانیسمهای نوری هوشمند است. محققان از یک فیبر نوری استفاده کردند که در انتهای آن یک کلاهک از جنس الاستومر نرم قرار دارد. به محض تماس این نوک انعطافپذیر با هر سطحی، تغییر شکل اندکی در آن رخ میدهد که منجر به تغییر در نحوه انتشار و الگوی نور در داخل فیبر میشود.
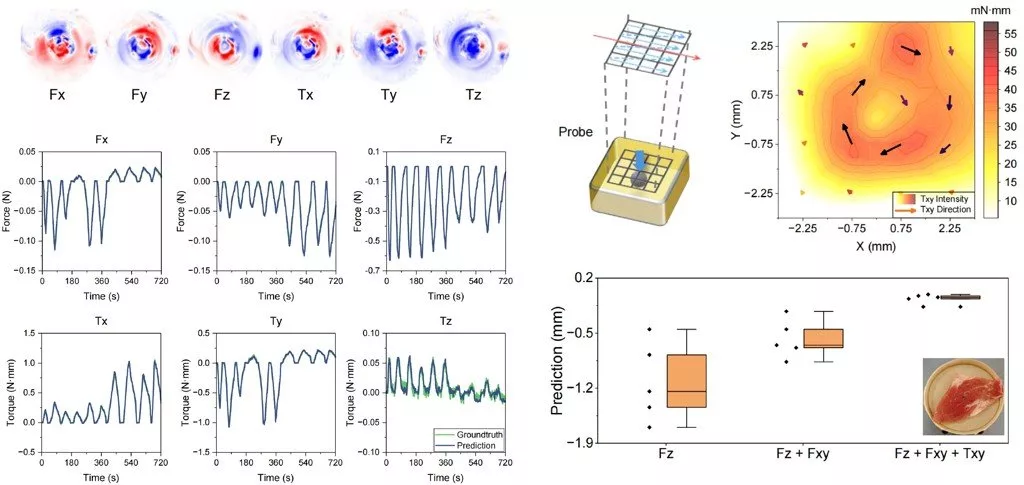
این الگوهای نوری توسط یک دسته فیبر منسجم به یک دوربین منتقل و سپس با الگوریتمهای پیشرفته و روشهای دادهمحور تحلیل میشوند تا میزان دقیق نیرو و جهت آن محاسبه گردد. مدیر این پروژه میگوید که برتری این روش نسبت به فناوریهای قدیمیتر مانند توری براگ فیبری (FBG) در سادگی ساختاری و حذف سیمکشیهای حجیم است.
یکی از قابلیتهای شگفتانگیز این دستگاه که در آزمایشهای عملی به اثبات رسیده، توانایی شناسایی اجسام سخت و تومورهای پنهان در زیر لایههای نرم بافتی است. محققان با آزمایش حسگر روی مدلهای ژلاتینی حاوی توده دریافتند که این ابزار میتواند با حرکت روی سطح، اشیای کروی پنهان را که مشابه تومورهای سرطانی هستند، ردیابی و مکانیابی کند.
در مسیر تجاریسازی و کاربردیشدن این پروژه، محققان میخواهند فرایند ساخت را متمرکزتر کنند و نیاز به کالیبراسیون یا تنظیمات اولیه دستی را به حداقل برسانند. هدف نهایی این دانشمندان، یکپارچهسازی این حسگرهای نوری با بازوهای رباتیک صنعتی و پزشکی است تا بتوانند در شرایط واقعی اتاق عمل عملکردی پایدار و طولانیمدت داشته باشند.
یافتههای این پژوهش در ژورنال Optica منتشر شده است.